
Linear algebra serves as a cornerstone in advanced mathematics, physics, computer science, and engineering. Among its fundamental concepts, the idea of a basis in a vector space is especially crucial. But what exactly does “basis” mean in linear algebra? In this article, we will cover the definition of basis in linear algebra, how to find a basis, and explore the change of basis in linear algebra with detailed explanations and examples.
Definition of Basis in Linear Algebra
In simple terms, a basis is a set of vectors in a vector space that are both:
- Linearly independent – No vector in the set can be formed by a combination of the others.
- Spanning – Any vector in the vector space can be written as a linear combination of the basis vectors.
Formal Definition:
Let V be a vector space over a field F. A subset B = {v1, v2, …, vn} of V is called a basis of V if:
- The vectors v1, v2, …, vn are linearly independent.
- The span of B, denoted as span(B), equals V, meaning every element in V can be expressed as a linear combination of vectors in B.
Example:
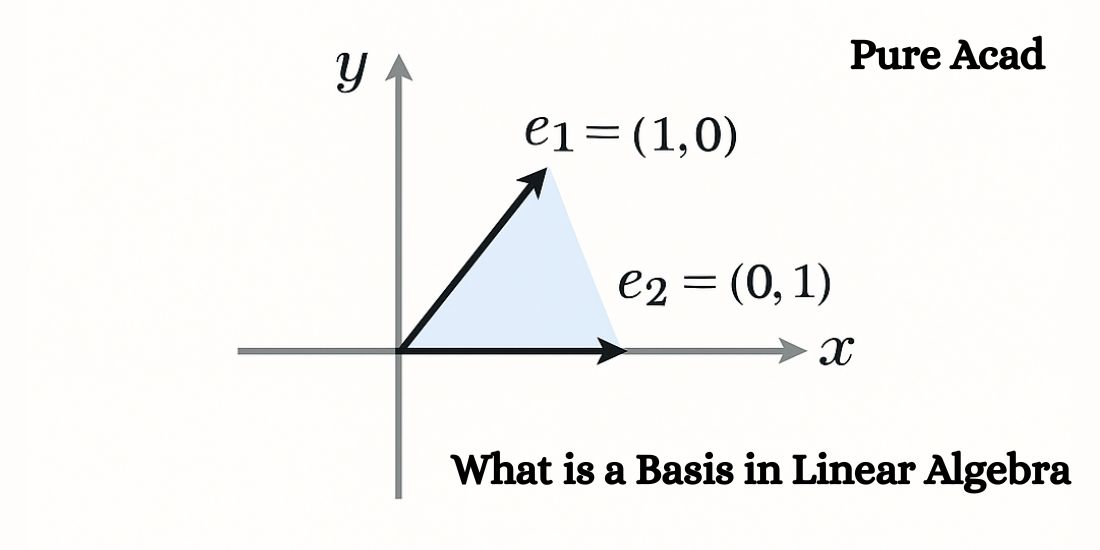
In ℝ², the standard basis is:
{ (1, 0), (0, 1) }
These two vectors are clearly linearly independent and span the entire 2D space.
Why is a Basis Important in Linear Algebra?
A basis simplifies complex vector spaces into understandable components. Here’s why it’s so essential:
- Coordinate Systems: Every vector in the space can be uniquely written as a combination of basis vectors. This gives coordinates with respect to the basis.
- Dimensional Insight: The number of vectors in a basis is the dimension of the vector space.
- Transformations: Basis changes help simplify matrices, linear maps, and other operations by shifting to more convenient coordinate systems.
How to Find a Basis in Linear Algebra
Finding a basis depends on what you’re working with — a matrix, a subspace, or a list of vectors. The general approach involves the following steps:
Step 1: Get a Spanning Set
Start with a set of vectors that spans the space. These could be column vectors of a matrix or simply a given list.
Step 2: Check for Linear Independence
Use techniques like row reduction (Gaussian elimination) to verify if the vectors are linearly independent.
Step 3: Eliminate Redundancy
Remove any dependent vectors to ensure the remaining vectors form a minimal spanning set — which is your basis.
Example: Finding a Basis for Column Space
Consider the matrix:
A = [ 1 2 3
2 4 6
3 6 9 ]
To find a basis for the column space:
- Convert the matrix into row-echelon form:
[ 1 2 3
0 0 0
0 0 0 ]
- The first column is a pivot column; the others are linear combinations. So, the basis is:
{
[ 1
2
3 ]
}
The column space has dimension 1.
What is a Change of Basis in Linear Algebra?
A change of basis is the process of converting vector representations from one basis to another within the same vector space.
Why Change the Basis?
- To simplify calculations
- To diagonalize matrices
- To express data in a more meaningful or intuitive form
Mathematical Formulation
Let:
- B = {b1, …, bn} be the original basis
- C = {c1, …, cn} be the new basis
- [v]B be the coordinates of vector v in basis B
To convert coordinates from B to C, we use a change-of-basis matrix P:
[v]C = P−1[v]B
Where P is the matrix whose columns are the vectors of the new basis expressed in terms of the old basis.
Example: Change of Basis in ℝ2
Let’s say the standard basis is:
e1 = (1, 0), e2 = (0, 1)
And the new basis is:
b1 = (1, 1), b2 = (1, –1)
To express a vector v = (2, 0) in the new basis:
Solve the system:
(2, 0) = x(1, 1) + y(1, –1)
⇒ x + y = 2, x – y = 0 ⇒ x = 1, y = 1
So, the coordinates of v in the new basis are (1, 1).
Types of Basis in Linear Algebra
Several kinds of bases are useful in different contexts:
1. Standard Basis
The most commonly used basis — unit vectors along each axis in Euclidean space.
2. Orthonormal Basis
Vectors that are both orthogonal and of unit length. Widely used in Fourier analysis, quantum mechanics, etc.
3. Eigenbasis
A basis made of eigenvectors. Used in diagonalizing matrices and solving differential equations.
4. Coordinate Basis
A set of basis vectors associated with coordinate systems in multivariable calculus or differential geometry.
Applications of Basis in Real Life
- Computer Graphics: Coordinate transformations for rendering scenes.
- Data Compression: Changing basis (like Fourier or wavelet transforms) helps in compressing images and signals.
- Machine Learning: Principal Component Analysis (PCA) finds a new basis to represent data efficiently.
- Quantum Physics: Quantum states are expressed as combinations of basis states in Hilbert spaces.
Tips for Students Learning About Basis
- Master Linear Independence: It’s the foundation for identifying bases.
- Practice Change of Basis Problems: They sharpen understanding of vector representation.
- Visualize with Graphs: In 2D and 3D, plotting helps understand the geometry of bases.
- Relate to Real Use Cases: Connect the theory with how basis transformations work in your field.
Summary
Understanding what a basis in linear algebra is forms the foundation of numerous higher-level concepts. The definition of basis in linear algebra emphasizes linear independence and span. You now know how to find a basis in linear algebra and the importance of the change of basis in linear algebra in simplifying computations and revealing structure in data.
Mastering the basis concept empowers you to tackle advanced linear algebra topics and real-world applications alike.
This educational guide is proudly presented by Pure Acad, your reliable platform for mastering academic fundamentals.







{kind=link}